7.7 LookAt na prática
Nesta seção, seguiremos o passo a passo de desenvolvimento de uma aplicação que renderiza uma cena 3D do ponto de vista de uma câmera LookAt.
A cena 3D será composta por quatro instâncias do modelo “Stanford Bunny” dispostos sobre o plano \(xz\) do espaço do mundo. A câmera LookAt simulará um observador em primeira pessoa. A figura 7.31 mostra o posicionamento dos objetos e a localização inicial da câmera.
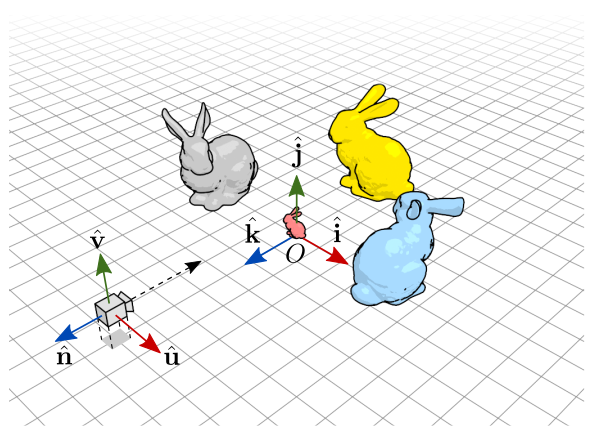
Figura 7.31: Objetos e elementos de cena dispostos no espaço do mundo.
Na figura acima, os vetores \(\hat{\mathbf{i}}\),\(\hat{\mathbf{j}}\),\(\hat{\mathbf{k}}\) correspondem às direções dos eixos \(x\),\(y\),\(z\) do quadro padrão com ponto de referência na origem \((0,0,0)\). Os vetores \(\hat{\mathbf{u}}\),\(\hat{\mathbf{v}}\),\(\hat{\mathbf{n}}\) são os vetores de base do quadro da câmera com \(P_0=(0, 0.5, 2.5)\). A câmera está localizada na origem de seu quadro e está olhando na direção de seu eixo \(z\) negativo.
- O coelho vermelho está na posição \((0,0,0)\) do quadro padrão e tem escala de \(10\%\) do tamanho original.
- O coelho cinza está na posição \((-1,0,0)\) do quadro padrão e está rodado em \(90^{\circ}\) em torno do eixo \(y\) de seu quadro local.
- O coelho azul está na posição \((1,0,0)\) do quadro padrão e está rodado em \(-90^{\circ}\) em torno do eixo \(y\) de seu quadro local.
- O coelho amarelo está na posição \((0,0,-1)\) do quadro padrão e está com sua orientação original.
A posição e orientação da câmera podem ser modificadas através do teclado:
- As setas para cima/baixo (ou
W/S) fazem a câmera ir para a frente e para trás ao longo da direção de visão (direção de \(\pm\hat{\mathbf{n}}\)). Esse movimento de câmera é conhecido como dolly no jargão da cinematografia. - As setas para os lados (ou
A/D) fazem a câmera girar em torno de seu eixo \(y\) (vetor \(\hat{\mathbf{v}}\)). Esse movimento é chamado de pan. - As teclas
Q/Efazem a câmera deslizar para os lados (direção de \(\pm\hat{\mathbf{u}}\)). Esse movimento é chamado de truck ou dolly lateral.
Neste exemplo, a altura da câmera permanecerá sempre em \(y=0.5\).
O resultado ficará como a seguir:
Para controlar a câmera usando o teclado é necessário abrir o link original e clicar na área de desenho. Desse modo a aplicação terá o foco do teclado.
Configuração inicial
No arquivo
abcg/examples/CMakeLists.txt, inclua a linha:add_subdirectory(lookat)Crie o subdiretório
abcg/examples/lookate o arquivoabcg/examples/lookat/CMakeLists.txtcom o seguinte conteúdo:project(lookat) add_executable(${PROJECT_NAME} camera.cpp ground.cpp main.cpp window.cpp) enable_abcg(${PROJECT_NAME})Crie os arquivos
camera.cpp,camera.hpp,ground.cpp,ground.hpp,main.cpp,window.cppewindow.hpp.Crie o subdiretório
abcg/examples/lookat/assets. Dentro dele, crie os arquivoslookat.fragelookat.vert. Além disso, baixe o arquivobunny.zipe descompacte-o emassets.
A estrutura de abcg/examples/lookat ficará assim:
lookat/
│ CMakeLists.txt
│ camera.hpp
│ camera.cpp
│ ground.hpp
│ ground.cpp
│ main.cpp
│ window.hpp
│ window.cpp
│
└───assets/
│ bunny.obj
│ lookat.frag
└ lookat.vertmain.cpp
Exceto pelo título da janela, o conteúdo de main.cpp é o mesmo do projeto anterior:
#include "window.hpp"
int main(int argc, char **argv) {
try {
abcg::Application app(argc, argv);
Window window;
window.setOpenGLSettings({.samples = 4});
window.setWindowSettings({
.width = 600,
.height = 600,
.title = "LookAt Camera",
});
app.run(window);
} catch (std::exception const &exception) {
fmt::print(stderr, "{}\n", exception.what());
return -1;
}
return 0;
}lookat.vert
O vertex shader ficará como a seguir:
#version 300 es
layout(location = 0) in vec3 inPosition;
uniform vec4 color;
uniform mat4 modelMatrix;
uniform mat4 viewMatrix;
uniform mat4 projMatrix;
out vec4 fragColor;
void main() {
vec4 posEyeSpace = viewMatrix * modelMatrix * vec4(inPosition, 1);
float i = 1.0 - (-posEyeSpace.z / 5.0);
fragColor = vec4(i, i, i, 1) * color;
gl_Position = projMatrix * posEyeSpace;
}O atributo de entrada, inPosition, é a posição \((x,y,z)\) do vértice. Vamos supor que estas coordenadas estão no espaço do objeto.
O atributo de saída, fragColor, é uma cor RGBA.
As variáveis uniformes são utilizadas para determinar a cor do objeto (color, na linha 5) e as matrizes \(4 \times 4\) de transformação geométrica (linhas 6 a 8):
- Matriz de modelo:
modelMatrix; - Matriz de visão:
viewMatrix; - Matriz de projeção:
projMatrix.
Embora ainda não tenhamos visto a fundamentação teórica sobre a construção de uma matriz de projeção, vamos utilizar essa matriz desde já. Ela será necessária para obter o efeito de perspectiva e assim manter a ilusão de que a câmera LookAt é um observador dentro de um cenário 3D.
No código de main, a linha 13 transforma a posição de entrada usando as matrizes de modelo e visão. Para entendermos a ordem das transformações a partir do espaço do objeto, temos de ler os operandos da direita para a esquerda:
Primeiro, vec4(inPosition, 1) produz a posição \((x,y,z,1)\), isto é, o ponto/vértice em coordenadas homogêneas que corresponde à posição \((x,y,z)\) no espaço do objeto. Esse vértice é transformado, através do produto matricial, pela matriz de modelo modelMatrix. A transformação pela matriz de modelo converte coordenadas do espaço do objeto para o espaço do mundo. Em seguida há uma transformação pela matriz de visão viewMatrix. A matriz de visão converte coordenadas do espaço do mundo para coordenadas do espaço da câmera. Assim, o resultado armazenado em posEyeSpace é a posição do vértice no espaço da câmera.
Na linha 15, calculamos um valor i de intensidade de cor a partir da coordenada \(z\) do vértice no espaço da câmera:
Lembre-se que, no espaço da câmera, a câmera está olhando na direção de seu eixo \(z\) negativo. Logo, do ponto de vista da câmera, todos os objetos à sua frente têm valor \(z\) negativo. Ao fazermos -PosEyeSpace.z, tornamos esse valor positivo, correspondendo à distância entre o vértice e a câmera ao longo do eixo \(z\). A ideia aqui é transformar essa distância em um valor de intensidade de cor. A intensidade será máxima (1) se o objeto estiver o mais próximo possível da câmera (isto é, se estiver na mesma posição da câmera), e mínima (0) se estiver a 5 ou mais unidades de distância na direção de visão. Na linha 16, esse valor de intensidade é utilizado para multiplicar as componentes RGB da cor color.
Assim, quanto mais longe o objeto estiver da câmera, mais escuro ele ficará. A partir da distância 5, a intensidade fica negativa, mas nesse caso o OpenGL fixa automaticamente o valor de cor para zero, pois uma cor não pode ter intensidade negativa.
Na linha 18, projMatrix * posEyeSpace faz com que as coordenadas no espaço da câmera sejam convertidas para o espaço de recorte. É esse o resultado final armazenado em gl_Position:
lookat.frag
O conteúdo do fragment shader ficará assim:
#version 300 es
precision mediump float;
in vec4 fragColor;
out vec4 outColor;
void main() {
if (gl_FrontFacing) {
outColor = fragColor;
} else {
outColor = fragColor * 0.5;
}
}Se o triângulo estiver orientado de frente para a câmera, a cor final do fragmento será a cor de entrada (fragColor). Caso contrário, a cor terá metade da intensidade original (a cor RGB é multiplicada por 0.5). Assim, se a câmera estiver dentro de um objeto, os triângulos serão desenhados com uma cor mais escura, pois estaremos vendo o lado de trás da malha triangular.
camera.hpp
Neste arquivo definiremos a classe Camera que gerenciará a câmera LookAt. O conteúdo ficará como a seguir:
#ifndef CAMERA_HPP_
#define CAMERA_HPP_
#include <glm/mat4x4.hpp>
#include <glm/vec3.hpp>
class Camera {
public:
void computeViewMatrix();
void computeProjectionMatrix(glm::vec2 const &size);
void dolly(float speed);
void truck(float speed);
void pan(float speed);
glm::mat4 const &getViewMatrix() const { return m_viewMatrix; }
glm::mat4 const &getProjMatrix() const { return m_projMatrix; }
private:
glm::vec3 m_eye{0.0f, 0.5f, 2.5f}; // Camera position
glm::vec3 m_at{0.0f, 0.5f, 0.0f}; // Look-at point
glm::vec3 m_up{0.0f, 1.0f, 0.0f}; // "up" direction
// Matrix to change from world space to camera space
glm::mat4 m_viewMatrix;
// Matrix to change from camera space to clip space
glm::mat4 m_projMatrix;
};
#endifObserve, nas linhas 20 a 22, que a classe tem todos os atributos necessários para criar o quadro de uma câmera LookAt:
m_eye: posição da câmera \((0, 0.5, 2.5)\).m_at: posição para onde a câmera está olhando \((0, 0.5, 0)\).m_up: vetor de direção para cima \((0, 1, 0)\).
Na linha 25 temos a matriz de visão (m_viewMatrix) que será calculada pela função Camera::computeViewMatrix declarada na linha 9.
Na linha 28 temos a matriz de projeção (m_projMatrix) que será calculada pela função Camera::computeProjectionMatrix declarada na linha 10.
As funções Camera::dolly, Camera::truck e Camera::pan serão chamadas a partir de Window em resposta à entrada do teclado. Internamente, essas funções modificarão as variáveis m_eye e m_at, fazendo a câmera mudar de posição e orientação.
Camera::getViewMatrix e Camera::getProjMatrix são funções de acesso à matriz de visão e projeção.
camera.cpp
A definição das funções membro de Camera ficará como a seguir:
#include "camera.hpp"
#include <glm/gtc/matrix_transform.hpp>
void Camera::computeProjectionMatrix(glm::vec2 const &size) {
m_projMatrix = glm::mat4(1.0f);
auto const aspect{size.x / size.y};
m_projMatrix = glm::perspective(glm::radians(70.0f), aspect, 0.1f, 5.0f);
}
void Camera::computeViewMatrix() {
m_viewMatrix = glm::lookAt(m_eye, m_at, m_up);
}
void Camera::dolly(float speed) {
// Compute forward vector (view direction)
auto const forward{glm::normalize(m_at - m_eye)};
// Move eye and center forward (speed > 0) or backward (speed < 0)
m_eye += forward * speed;
m_at += forward * speed;
computeViewMatrix();
}
void Camera::truck(float speed) {
// Compute forward vector (view direction)
auto const forward{glm::normalize(m_at - m_eye)};
// Compute vector to the left
auto const left{glm::cross(m_up, forward)};
// Move eye and center to the left (speed < 0) or to the right (speed > 0)
m_at -= left * speed;
m_eye -= left * speed;
computeViewMatrix();
}
void Camera::pan(float speed) {
glm::mat4 transform{1.0f};
// Rotate camera around its local y axis
transform = glm::translate(transform, m_eye);
transform = glm::rotate(transform, -speed, m_up);
transform = glm::translate(transform, -m_eye);
m_at = transform * glm::vec4(m_at, 1.0f);
computeViewMatrix();
}No próximo capítulo, quando tivermos visto o conteúdo teórico sobre matrizes de projeção, descreveremos o funcionamento da função Camera::computeProjectionMatrix. Por enquanto, basta sabermos que ela calcula uma matriz de projeção perspectiva.
Em Camera::computeViewMatrix, chamamos a função lookAt da GLM usando os atributos da câmera:
Camera::computeViewMatrix será chamada sempre que houver alguma alteração em m_eye ou m_at.
Em Camera::dolly, os pontos m_eye e m_at são deslocados para a frente ou para trás ao longo da direção de visão (vetor forward):
void Camera::dolly(float speed) {
// Compute forward vector (view direction)
auto const forward{glm::normalize(m_at - m_eye)};
// Move eye and center forward (speed > 0) or backward (speed < 0)
m_eye += forward * speed;
m_at += forward * speed;
computeViewMatrix();
}Veja que, ao final, Camera::computeViewMatrix é chamada para reconstruir a matriz de visão.
Camera::truck funciona de forma parecida com Camera::dolly. Os pontos m_eye e m_at são deslocados nas laterais de acordo com a direção do vetor left. O vetor left é o produto vetorial entre o vetor up e o vetor forward.
void Camera::truck(float speed) {
// Compute forward vector (view direction)
auto const forward{glm::normalize(m_at - m_eye)};
// Compute vector to the left
auto const left{glm::cross(m_up, forward)};
// Move eye and center to the left (speed < 0) or to the right (speed > 0)
m_at -= left * speed;
m_eye -= left * speed;
computeViewMatrix();
}Camera::pan faz o movimento de girar a câmera em torno de seu eixo \(y\). Isso é feito alterando apenas o ponto m_at:
void Camera::pan(float speed) {
glm::mat4 transform{1.0f};
// Rotate camera around its local y axis
transform = glm::translate(transform, m_eye);
transform = glm::rotate(transform, -speed, m_up);
transform = glm::translate(transform, -m_eye);
m_at = transform * glm::vec4(m_at, 1.0f);
computeViewMatrix();
}Após a linha 40, a matriz transform representa uma concatenação de transformações na forma:
\[ \mathbf{M}=\mathbf{I}.\mathbf{T}(\mathbf{p}_{\textrm{eye}}).\mathbf{R}_y(\theta).\mathbf{T}(-\mathbf{p}_{\textrm{eye}}). \]
A ordem de aplicação das transformações é obtida lendo a expressão acima da direita para a esquerda (no código, lemos de baixo para cima, da linha 45 à linha 40):
- \(\mathbf{T}(-\mathbf{p}_{\textrm{eye}})\) (linha 45) tem o efeito de transladar a câmera para a origem do mundo, isto é, faz o ponto \(\mathbf{p}_{\textrm{eye}}\) virar a origem \(O\).
- \(\mathbf{R}_y(\theta)\) (linha 44) roda a câmera em torno do eixo \(y\) do mundo. Como a câmera agora está na origem, é como se a câmera fosse girada em torno de seu próprio eixo \(y\).
- \(\mathbf{T}(\mathbf{p}_{\textrm{eye}})\) (linha 43) é a transformação inversa da primeira, isto é, faz a câmera voltar à sua posição original (mas note que, por causa do passo anterior, a orientação da câmera não é mais a orientação original).
- \(\mathbf{I}\) é a matriz identidade (criada na linha 40).
A linha 47 transforma m_at por transform. O resultado é rodar m_at em torno do eixo \(y\) local da câmera.
As operações da linha 40 até a linha 45 em Camera::pan são equivalentes ao pseudocódigo:
transform = I;
transform = transform * T(m_eye);
transform = transform * Ry(-speed);
transform = transform * T(-m_eye);que é o mesmo que
transform = I * T(m_eye) * Ry(-speed) * T(-m_eye);onde I, Ry e T são as matrizes de transformação identidade, rotação em \(y\), e translação.
window.hpp
Deixaremos a definição da classe Window como a seguir:
#ifndef WINDOW_HPP_
#define WINDOW_HPP_
#include "abcgOpenGL.hpp"
#include "camera.hpp"
#include "ground.hpp"
struct Vertex {
glm::vec3 position;
friend bool operator==(Vertex const &, Vertex const &) = default;
};
class Window : public abcg::OpenGLWindow {
protected:
void onEvent(SDL_Event const &event) override;
void onCreate() override;
void onPaint() override;
void onPaintUI() override;
void onResize(glm::ivec2 const &size) override;
void onDestroy() override;
void onUpdate() override;
private:
glm::ivec2 m_viewportSize{};
GLuint m_VAO{};
GLuint m_VBO{};
GLuint m_EBO{};
GLuint m_program{};
GLint m_viewMatrixLocation{};
GLint m_projMatrixLocation{};
GLint m_modelMatrixLocation{};
GLint m_colorLocation{};
Camera m_camera;
float m_dollySpeed{};
float m_truckSpeed{};
float m_panSpeed{};
Ground m_ground;
std::vector<Vertex> m_vertices;
std::vector<GLuint> m_indices;
void loadModelFromFile(std::string_view path);
};
#endifO código é semelhante ao dos projetos anteriores. As principais diferenças estão nas seguintes linhas:
- Linhas 6 e 7: inclusão dos cabeçalhos
camera.hppeground.hpp; - Linhas 33 a 36: identificadores das variáveis
uniformdo vertex shader; - Linha 38: definição de um objeto da classe
Camerapara controlar a câmera LookAt; - Linhas 39 a 41: definição de variáveis de controle de velocidade de dolly, truck e pan;
- Linha 43: definição de um objeto da classe
Groundpara desenhar o chão.
Algumas coisas foram removidas em relação ao projeto loadmodel, como a variável que controlava o número de triângulos exibidos e a função OpenGLWindow::standardize que normalizava e centralizava o modelo no NDC. Dessa vez, o modelo armazenado no VBO será o modelo sem modificações, isto é, o modelo lido diretamente do arquivo. Para mudar a escala e posição do modelo, usaremos a matriz de modelo.
window.cpp
No início de window.cpp fazemos a especialização explícita de std::hash para Vertex, como fizemos no projeto anterior:
#include "window.hpp"
#include <unordered_map>
// Explicit specialization of std::hash for Vertex
template <> struct std::hash<Vertex> {
size_t operator()(Vertex const &vertex) const noexcept {
auto const h1{std::hash<glm::vec3>()(vertex.position)};
return h1;
}
};A definição de Window::onEvent vem a seguir:
void Window::onEvent(SDL_Event const &event) {
if (event.type == SDL_KEYDOWN) {
if (event.key.keysym.sym == SDLK_UP || event.key.keysym.sym == SDLK_w)
m_dollySpeed = 1.0f;
if (event.key.keysym.sym == SDLK_DOWN || event.key.keysym.sym == SDLK_s)
m_dollySpeed = -1.0f;
if (event.key.keysym.sym == SDLK_LEFT || event.key.keysym.sym == SDLK_a)
m_panSpeed = -1.0f;
if (event.key.keysym.sym == SDLK_RIGHT || event.key.keysym.sym == SDLK_d)
m_panSpeed = 1.0f;
if (event.key.keysym.sym == SDLK_q)
m_truckSpeed = -1.0f;
if (event.key.keysym.sym == SDLK_e)
m_truckSpeed = 1.0f;
}
if (event.type == SDL_KEYUP) {
if ((event.key.keysym.sym == SDLK_UP || event.key.keysym.sym == SDLK_w) &&
m_dollySpeed > 0)
m_dollySpeed = 0.0f;
if ((event.key.keysym.sym == SDLK_DOWN || event.key.keysym.sym == SDLK_s) &&
m_dollySpeed < 0)
m_dollySpeed = 0.0f;
if ((event.key.keysym.sym == SDLK_LEFT || event.key.keysym.sym == SDLK_a) &&
m_panSpeed < 0)
m_panSpeed = 0.0f;
if ((event.key.keysym.sym == SDLK_RIGHT ||
event.key.keysym.sym == SDLK_d) &&
m_panSpeed > 0)
m_panSpeed = 0.0f;
if (event.key.keysym.sym == SDLK_q && m_truckSpeed < 0)
m_truckSpeed = 0.0f;
if (event.key.keysym.sym == SDLK_e && m_truckSpeed > 0)
m_truckSpeed = 0.0f;
}
}Os eventos de teclado são tratados de forma separada para as teclas pressionadas (SDL_KEYDOWN, linhas 14 a 27) e para as teclas liberadas (SDL_KEYUP, linhas 28 a 46).
Quando uma tecla é pressionada (setas ou QEWASD), a velocidade de dolly, pan ou truck é modificada para +1 ou -1. Quando a tecla é liberada, a velocidade correspondente volta para 0.
Vamos agora à definição de Window::onCreate, que também é bem parecida com a do projeto loadmodel:
void Window::onCreate() {
auto const &assetsPath{abcg::Application::getAssetsPath()};
abcg::glClearColor(0, 0, 0, 1);
// Enable depth buffering
abcg::glEnable(GL_DEPTH_TEST);
// Create program
m_program =
abcg::createOpenGLProgram({{.source = assetsPath + "lookat.vert",
.stage = abcg::ShaderStage::Vertex},
{.source = assetsPath + "lookat.frag",
.stage = abcg::ShaderStage::Fragment}});
m_ground.create(m_program);
// Get location of uniform variables
m_viewMatrixLocation = abcg::glGetUniformLocation(m_program, "viewMatrix");
m_projMatrixLocation = abcg::glGetUniformLocation(m_program, "projMatrix");
m_modelMatrixLocation = abcg::glGetUniformLocation(m_program, "modelMatrix");
m_colorLocation = abcg::glGetUniformLocation(m_program, "color");
// Load model
loadModelFromFile(assetsPath + "bunny.obj");
// Generate VBO
abcg::glGenBuffers(1, &m_VBO);
abcg::glBindBuffer(GL_ARRAY_BUFFER, m_VBO);
abcg::glBufferData(GL_ARRAY_BUFFER,
sizeof(m_vertices.at(0)) * m_vertices.size(),
m_vertices.data(), GL_STATIC_DRAW);
abcg::glBindBuffer(GL_ARRAY_BUFFER, 0);
// Generate EBO
abcg::glGenBuffers(1, &m_EBO);
abcg::glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, m_EBO);
abcg::glBufferData(GL_ELEMENT_ARRAY_BUFFER,
sizeof(m_indices.at(0)) * m_indices.size(),
m_indices.data(), GL_STATIC_DRAW);
abcg::glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, 0);
// Create VAO
abcg::glGenVertexArrays(1, &m_VAO);
// Bind vertex attributes to current VAO
abcg::glBindVertexArray(m_VAO);
abcg::glBindBuffer(GL_ARRAY_BUFFER, m_VBO);
auto const positionAttribute{
abcg::glGetAttribLocation(m_program, "inPosition")};
abcg::glEnableVertexAttribArray(positionAttribute);
abcg::glVertexAttribPointer(positionAttribute, 3, GL_FLOAT, GL_FALSE,
sizeof(Vertex), nullptr);
abcg::glBindBuffer(GL_ARRAY_BUFFER, 0);
abcg::glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, m_EBO);
// End of binding to current VAO
abcg::glBindVertexArray(0);
}Em relação ao projeto anterior, modificamos o nomes dos shaders lidos (linhas 58 a 62) e chamamos Ground::create na linha 64 para inicializar o VAO/VBO do chão.
A definição de Window::loadModelFromFile é a mesma do projeto anterior:
void Window::loadModelFromFile(std::string_view path) {
tinyobj::ObjReader reader;
if (!reader.ParseFromFile(path.data())) {
if (!reader.Error().empty()) {
throw abcg::RuntimeError(
fmt::format("Failed to load model {} ({})", path, reader.Error()));
}
throw abcg::RuntimeError(fmt::format("Failed to load model {}", path));
}
if (!reader.Warning().empty()) {
fmt::print("Warning: {}\n", reader.Warning());
}
auto const &attributes{reader.GetAttrib()};
auto const &shapes{reader.GetShapes()};
m_vertices.clear();
m_indices.clear();
// A key:value map with key=Vertex and value=index
std::unordered_map<Vertex, GLuint> hash{};
// Loop over shapes
for (auto const &shape : shapes) {
// Loop over indices
for (auto const offset : iter::range(shape.mesh.indices.size())) {
// Access to vertex
auto const index{shape.mesh.indices.at(offset)};
// Vertex position
auto const startIndex{3 * index.vertex_index};
auto const vx{attributes.vertices.at(startIndex + 0)};
auto const vy{attributes.vertices.at(startIndex + 1)};
auto const vz{attributes.vertices.at(startIndex + 2)};
Vertex const vertex{.position = {vx, vy, vz}};
// If map doesn't contain this vertex
if (!hash.contains(vertex)) {
// Add this index (size of m_vertices)
hash[vertex] = m_vertices.size();
// Add this vertex
m_vertices.push_back(vertex);
}
m_indices.push_back(hash[vertex]);
}
}
}Vamos à definição de Window::onPaint:
void Window::onPaint() {
// Clear color buffer and depth buffer
abcg::glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
abcg::glViewport(0, 0, m_viewportSize.x, m_viewportSize.y);
abcg::glUseProgram(m_program);
// Set uniform variables for viewMatrix and projMatrix
// These matrices are used for every scene object
abcg::glUniformMatrix4fv(m_viewMatrixLocation, 1, GL_FALSE,
&m_camera.getViewMatrix()[0][0]);
abcg::glUniformMatrix4fv(m_projMatrixLocation, 1, GL_FALSE,
&m_camera.getProjMatrix()[0][0]);
abcg::glBindVertexArray(m_VAO);
// Draw white bunny
glm::mat4 model{1.0f};
model = glm::translate(model, glm::vec3(-1.0f, 0.0f, 0.0f));
model = glm::rotate(model, glm::radians(90.0f), glm::vec3(0, 1, 0));
model = glm::scale(model, glm::vec3(0.5f));
abcg::glUniformMatrix4fv(m_modelMatrixLocation, 1, GL_FALSE, &model[0][0]);
abcg::glUniform4f(m_colorLocation, 1.0f, 1.0f, 1.0f, 1.0f);
abcg::glDrawElements(GL_TRIANGLES, m_indices.size(), GL_UNSIGNED_INT,
nullptr);
// Draw yellow bunny
model = glm::mat4(1.0);
model = glm::translate(model, glm::vec3(0.0f, 0.0f, -1.0f));
model = glm::scale(model, glm::vec3(0.5f));
abcg::glUniformMatrix4fv(m_modelMatrixLocation, 1, GL_FALSE, &model[0][0]);
abcg::glUniform4f(m_colorLocation, 1.0f, 0.8f, 0.0f, 1.0f);
abcg::glDrawElements(GL_TRIANGLES, m_indices.size(), GL_UNSIGNED_INT,
nullptr);
// Draw blue bunny
model = glm::mat4(1.0);
model = glm::translate(model, glm::vec3(1.0f, 0.0f, 0.0f));
model = glm::rotate(model, glm::radians(-90.0f), glm::vec3(0, 1, 0));
model = glm::scale(model, glm::vec3(0.5f));
abcg::glUniformMatrix4fv(m_modelMatrixLocation, 1, GL_FALSE, &model[0][0]);
abcg::glUniform4f(m_colorLocation, 0.0f, 0.8f, 1.0f, 1.0f);
abcg::glDrawElements(GL_TRIANGLES, m_indices.size(), GL_UNSIGNED_INT,
nullptr);
// Draw red bunny
model = glm::mat4(1.0);
model = glm::scale(model, glm::vec3(0.1f));
abcg::glUniformMatrix4fv(m_modelMatrixLocation, 1, GL_FALSE, &model[0][0]);
abcg::glUniform4f(m_colorLocation, 1.0f, 0.25f, 0.25f, 1.0f);
abcg::glDrawElements(GL_TRIANGLES, m_indices.size(), GL_UNSIGNED_INT,
nullptr);
abcg::glBindVertexArray(0);
// Draw ground
m_ground.paint();
abcg::glUseProgram(0);
}Nas linhas 173 a 176, o conteúdo das matrizes de visão e projeção é enviado às variáveis uniformes no shader:
// Set uniform variables for viewMatrix and projMatrix
// These matrices are used for every scene object
abcg::glUniformMatrix4fv(viewMatrixLoc, 1, GL_FALSE,
&m_camera.m_viewMatrix[0][0]);
abcg::glUniformMatrix4fv(projMatrixLoc, 1, GL_FALSE,
&m_camera.m_projMatrix[0][0]);Observe o uso da função glUniformMatrix4fv. Essa função tem a assinatura
void glUniformMatrix4fv(GLint location,
GLsizei count,
GLboolean transpose,
const GLfloat *value);onde
locationé o identificador de localização da variável uniforme no shader;counté o número de matrizes que queremos transferir à variável uniforme;transposeé um valor booleano que indica se queremos enviar a transposta da matriz;valueé o ponteiro para o primeiro elemento do arranjo de elementos da matriz.
A renderização do coelho branco é configurada nas linhas 181 a 189:
// Draw white bunny
glm::mat4 model{1.0f};
model = glm::translate(model, glm::vec3(-1.0f, 0.0f, 0.0f));
model = glm::rotate(model, glm::radians(90.0f), glm::vec3(0, 1, 0));
model = glm::scale(model, glm::vec3(0.5f));
abcg::glUniformMatrix4fv(m_modelMatrixLocation, 1, GL_FALSE, &model[0][0]);
abcg::glUniform4f(m_colorLocation, 1.0f, 1.0f, 1.0f, 1.0f);
abcg::glDrawElements(GL_TRIANGLES, m_indices.size(), GL_UNSIGNED_INT,
nullptr);Nas linhas 181 a 184 é criada a concatenação de transformações que forma a matriz de modelo (model). Para o coelho branco, essa concatenação é
\[
\mathbf{M}_{\textrm{model}}=\mathbf{I}.\mathbf{T}(-1,0,0).\mathbf{R}_y\left(\frac{\pi}{2}\right).\mathbf{S}(0.5, 0.5, 0.5).
\]
Essas transformações servem para posicionar o modelo do coelho no mundo. Inicialmente o modelo está em seu quadro local, com posição e orientação definida no arquivo bunny.obj: na origem, sobre o plano \(y=0\), como vimos na figura 7.16. As transformações são aplicadas da seguinte forma:
- Transformação de escala para reduzir o tamanho do coelho para \(50\%\) de seu tamanho original (linha 184);
- Rotação em \(90^{\circ}\) em torno do eixo \(y\) do espaço do objeto, que é o mesmo eixo \(y\) do espaço do mundo (linha 183);
- Translação pelo vetor \((-1,0,0)\), que posiciona o coelho em sua posição final na cena (linha 182);
- Transformação identidade (linha 181).
Na linha 186, a matriz de modelo é enviada à variável uniforme m_modelMatrix no vertex shader.
Na linha 187, a variável uniforme color é definida com \((1,1,1,1)\) (branco) no vertex shader.
Na linha 188 é feita a chamada ao comando de renderização.
Observe como um procedimento semelhante é feito para os outros coelhos. Mudam apenas as transformações que serão usadas para criar a matriz model, e o valor de cor definido na variável uniforme color.
Para o coelho amarelo:
// Draw yellow bunny
model = glm::mat4(1.0);
model = glm::translate(model, glm::vec3(0.0f, 0.0f, -1.0f));
model = glm::scale(model, glm::vec3(0.5f));
abcg::glUniformMatrix4fv(m_modelMatrixLocation, 1, GL_FALSE, &model[0][0]);
abcg::glUniform4f(m_colorLocation, 1.0f, 0.8f, 0.0f, 1.0f);
abcg::glDrawElements(GL_TRIANGLES, m_indices.size(), GL_UNSIGNED_INT,
nullptr);Para o coelho azul:
// Draw blue bunny
model = glm::mat4(1.0);
model = glm::translate(model, glm::vec3(1.0f, 0.0f, 0.0f));
model = glm::rotate(model, glm::radians(-90.0f), glm::vec3(0, 1, 0));
model = glm::scale(model, glm::vec3(0.5f));
abcg::glUniformMatrix4fv(m_modelMatrixLocation, 1, GL_FALSE, &model[0][0]);
abcg::glUniform4f(m_colorLocation, 0.0f, 0.8f, 1.0f, 1.0f);
abcg::glDrawElements(GL_TRIANGLES, m_indices.size(), GL_UNSIGNED_INT,
nullptr);Para o pequeno coelho vermelho:
// Draw red bunny
model = glm::mat4(1.0);
model = glm::scale(model, glm::vec3(0.1f));
abcg::glUniformMatrix4fv(m_modelMatrixLocation, 1, GL_FALSE, &model[0][0]);
abcg::glUniform4f(m_colorLocation, 1.0f, 0.25f, 0.25f, 1.0f);
abcg::glDrawElements(GL_TRIANGLES, m_indices.size(), GL_UNSIGNED_INT,
nullptr);Note que todos os modelos foram renderizados com o mesmo VAO (linha 178), pois todos compartilham o mesmo VBO. É apenas a matriz de modelo que faz com que cada coelho tenha uma transformação diferente no cenário 3D.
Ao fim de Window::onPaint temos o seguinte código:
Na linha 221, o VAO dos coelhos deixa de ser usado. Em seguida, na linha 224, o chão é desenhado. O chão tem seu próprio VAO, mas usa os mesmos shaders dos coelhos. É por isso que o programa de shader só é desabilitado na linha 226 com a chamada a glUseProgram(0).
A definição de Window::onPaintUI e Window::onResize é dada a seguir:
void Window::onPaintUI() { abcg::OpenGLWindow::onPaintUI(); }
void Window::onResize(glm::ivec2 const &size) {
m_viewportSize = size;
m_camera.computeProjectionMatrix(size);
}A função Camera::computeProjectioMatrix é chamada dentro de Window::onResize para reconstruir a matriz de projeção. Os valores da matriz dependem do tamanho atual da janela.
A definição de Window::destroy ficará como a seguir:
void Window::onDestroy() {
m_ground.destroy();
abcg::glDeleteProgram(m_program);
abcg::glDeleteBuffers(1, &m_EBO);
abcg::glDeleteBuffers(1, &m_VBO);
abcg::glDeleteVertexArrays(1, &m_VAO);
}Não há nada de muito novo nesse código, exceto a chamada a Ground::destroy para liberar o VAO e VBO do chão.
Finalmente, a definição de Window::onUpdate ficará como a seguir:
void Window::onUpdate() {
auto const deltaTime{gsl::narrow_cast<float>(getDeltaTime())};
// Update LookAt camera
m_camera.dolly(m_dollySpeed * deltaTime);
m_camera.truck(m_truckSpeed * deltaTime);
m_camera.pan(m_panSpeed * deltaTime);
}Aqui, a posição e a orientação da câmera LookAt são atualizadas antes da chamada de Window::onPaint. As funções de movimentação da câmera são chamadas usando as variáveis de velocidade (m_dollySpeed, m_truckSpeed, m_panSpeed) que tiveram seus valores determinados em Window::onEvent de acordo com as teclas pressionadas.
ground.hpp
A classe Ground é responsável pelo desenho do chão. Embora não seja uma classe derivada de abcg::OpenGLWindow, os nomes das funções são semelhantes (create, paint e destroy). Como vimos anteriormente, essas funções são chamadas nas respectivas funções de Window:
#ifndef GROUND_HPP_
#define GROUND_HPP_
#include "abcgOpenGL.hpp"
class Ground {
public:
void create(GLuint program);
void paint();
void destroy();
private:
GLuint m_VAO{};
GLuint m_VBO{};
GLint m_modelMatrixLoc{};
GLint m_colorLoc{};
};
#endifGround::create recebe como parâmetro o identificador de um programa de shader já existente. Assim, o chão pode usar os mesmos shaders dos coelhos.
Em Ground::paint, veremos que o chão é desenhado como um padrão de xadrez. Como é um padrão composto por quadriláteros, o VBO não precisa ser a malha geométrica do chão inteiro, mas apenas um quadrilátero de tamanho unitário. Esse quadrilátero será desenhado várias vezes para formar um ladrilho com padrão de xadrez.
ground.cpp
Vamos começar com a definição de Ground::create:
#include "ground.hpp"
void Ground::create(GLuint program) {
// Unit quad on the xz plane
std::array<glm::vec3, 4> vertices{{{-0.5f, 0.0f, +0.5f},
{-0.5f, 0.0f, -0.5f},
{+0.5f, 0.0f, +0.5f},
{+0.5f, 0.0f, -0.5f}}};
// Generate VBO
abcg::glGenBuffers(1, &m_VBO);
abcg::glBindBuffer(GL_ARRAY_BUFFER, m_VBO);
abcg::glBufferData(GL_ARRAY_BUFFER, sizeof(vertices), vertices.data(),
GL_STATIC_DRAW);
abcg::glBindBuffer(GL_ARRAY_BUFFER, 0);
// Create VAO and bind vertex attributes
abcg::glGenVertexArrays(1, &m_VAO);
abcg::glBindVertexArray(m_VAO);
abcg::glBindBuffer(GL_ARRAY_BUFFER, m_VBO);
auto const positionAttribute{
abcg::glGetAttribLocation(program, "inPosition")};
abcg::glEnableVertexAttribArray(positionAttribute);
abcg::glVertexAttribPointer(positionAttribute, 3, GL_FLOAT, GL_FALSE, 0,
nullptr);
abcg::glBindBuffer(GL_ARRAY_BUFFER, 0);
abcg::glBindVertexArray(0);
// Save location of uniform variables
m_modelMatrixLoc = abcg::glGetUniformLocation(program, "modelMatrix");
m_colorLoc = abcg::glGetUniformLocation(program, "color");
}No início da função, definimos os vértices de um quadrilátero de tamanho unitário centralizado no plano \(xz\). Em seguida, criamos o VBO e fazemos a ligação do VBO com o atributo inPosition do shader program. Por fim, salvamos a localização das variáveis uniformes que serão utilizadas em Ground::paint.
A propósito, eis o código de Ground::paint:
void Ground::paint() {
abcg::glBindVertexArray(m_VAO);
// Draw a grid of 2N+1 x 2N+1 tiles on the xz plane, centered around the
// origin
auto const N{5};
for (auto const z : iter::range(-N, N + 1)) {
for (auto const x : iter::range(-N, N + 1)) {
// Set model matrix as a translation matrix
glm::mat4 model{1.0f};
model = glm::translate(model, glm::vec3(x, 0.0f, z));
abcg::glUniformMatrix4fv(m_modelMatrixLoc, 1, GL_FALSE, &model[0][0]);
// Set color (checkerboard pattern)
auto const gray{(z + x) % 2 == 0 ? 1.0f : 0.5f};
abcg::glUniform4f(m_colorLoc, gray, gray, gray, 1.0f);
abcg::glDrawArrays(GL_TRIANGLE_STRIP, 0, 4);
}
}
abcg::glBindVertexArray(0);
}Aqui, desenhamos uma grade de 11x11 quadriláteros (variando \(z\) e \(x\) de -5 a 5). Cada quadrilátero é transladado através de uma matriz de modelo e então desenhado com glDrawArrays usando a primitiva GL_TRIANGLE_STRIP. A cor utilizada – configurada pela variável uniforme do shader – é modificada de acordo com a paridade das coordenadas da grade de modo a formar o padrão de xadrez.
Em Ground::destroy, o VBO e o VAO são liberados:
Como o programa de shader é o mesmo dos coelhos, o responsável pela liberação dos shaders é Window, como já vimos em Window::onDestroy.
Isso conclui o projeto lookat. Baixe o código completo a partir deste link.