2.2 Linha do tempo
Nesta seção acompanharemos um resumo da evolução histórica da computação gráfica. Iniciaremos na década de 1950, com os primeiros computadores eletrônicos de uso geral e o surgimento das primeiras aplicações de computação gráfica, e seguiremos até a década atual com os desenvolvimentos mais recentes das atuais GPUs (Graphics Processing Units).
Embora a computação gráfica seja recente, assim como a própria ciência da computação, o desenvolvimento de seus fundamentos é anterior ao século XX e só foi possível devido às contribuições artísticas e matemáticas de diversos pioneiros. Para citar apenas alguns:
- Euclides de Alexandria (300 a.C.), com sua contribuição no desenvolvimento da geometria;
- Filippo Brunelleschi (1377–1446), com seus estudos sobre perspectiva;
- René Descartes (1596–1650), com o desenvolvimento da geometria analítica e os sistemas de coordenadas;
- Christiaan Huygens (1629–1695) e Isaac Newton (1643–1727) por suas investigações sobre os fenômenos da luz;
- Leonhard Euler (1707–1783), por sua contribuição na trigonometria e em topologia;
- James Joseph Sylvester (1814–1897), por suas contribuições na teoria das matrizes e invenção da notação matricial.
O uso de gráficos no computador também não teria sido possível sem os esforços que contribuíram para o surgimento dos computadores eletrônicos, e também dos primeiros dispositivos de exibição, como o tubo de raios catódicos no final do século XIX.
1950
Os primeiros computadores eletrônicos com dispositivos de exibição surgem neste período. O computador Whirlwind I, do MIT, originalmente projetado para ser parte de um simulador de vôo, foi um dos primeiros computadores digitais de uso geral com processamento em tempo real. O Whirlwind I era equipado com um CRT vetorial capaz de desenhar linhas e pontos.
Charles W. Adams e John T. Gilmore, programadores da equipe de desenvolvimento do Whirlwind, implementaram um programa de avaliação de equações diferenciais para produzir a animação da trajetória de uma bola quicando. Essa simulação pode ser considerada a primeira aplicação de computação gráfica interativa e um precursor do jogo de computador, pois o operador podia controlar, através de um botão, a frequência do quicar na tentativa de fazer a bola acertar uma lacuna na tela simulando um buraco no chão.
O sistema de defesa aérea SAGE evoluiu a partir do Whirlwind ao longo da década de 1950. As estações do SAGE contavam com telas CRT que exibiam dados de diferentes radares combinados com informações de referência geográfica. Cada estação era também equipada com uma caneta óptica. Através da caneta óptica, o operador podia apontar e selecionar elementos gráficos diretamente na tela (figura 2.7).
 em um CRT vetorial ([fonte](https://history-computer.com/sage-complete-history-of-the-sage-computer-system/)).](https://history-computer.com/ModernComputer/Electronic/Images/Sage_terminal.jpg)
Figura 2.7: Operador do SAGE usando uma caneta óptica em um CRT vetorial (fonte).
1960
Nesse período a computação gráfica se desenvolve nos laboratórios de pesquisa de universidades e surgem as primeiras aplicações de CAD (Computer-Aided Design) nas indústrias automotiva e aeroespacial. Na década de 1960 ocorrem importantes desenvolvimentos na área de modelagem geométrica, como o uso de curvas de Bézier e NURBS (Non-Uniform Rational Basis Spline).
Em 1960, a Digital Equipment Corporation (DEC) começa a produzir em escala comercial o computador PDP-1, equipado com CRT e caneta óptica. Em 1961, o cientista da computação Steve Russell (MIT) cria o “Spacewar!” (figura 2.8). O jogo ganha popularidade dentro e fora da universidade e vira referência no desenvolvimento de jogos digitais5.
).](images/02_spacewar.jpg)
Figura 2.8: Estudantes do MIT jogando Spacewar! no DEC PDP-1 (fonte).
Em 1963, Ivan Sutherland desenvolve o SketchPad, um sistema de projeto gráfico interativo que permite ao usuário manipular primitivas gráficas vetoriais através de uma caneta óptica e um CRT (Sutherland 1963). A figura 2.9 mostra Sutherland operando o SketchPad no computador TX-2 do MIT. O SketchPad é um marco no uso da interface gráfica do usuário (GUI, acrônimo de Graphical User Interface) e um precursor das aplicações de projeto assistido por computador (CAD).
).](https://www.mprove.de/visionreality/_media/fig3.1_Sketchpad.jpg)
Figura 2.9: Ivan Sutherland operando o SketchPad em 1962 (fonte).
Na década de 1960 surgem também os primeiros seminários e grupos de interesse em pesquisa sobre gráficos em computador. Na ACM (Association for Computing Machinery), tradicional sociedade científica e educacional dedicada à computação, é fundado o grupo SICGRAPH (Special Interest Committe on Computer Graphics) para promover seminários de computação gráfica. No final da década, o SICGRAPH muda de nome para SIGGRAPH (Special Interest Group on Computer Graphics and Interactive Techniques). A conferência SIGGRAPH é realizada anualmente e é hoje uma das principais conferências de computação gráfica no mundo.
1970
Durante a década de 1970 são desenvolvidas muitas das técnicas de síntese de imagens em tempo real utilizadas atualmente.
Em 1971, o então aluno de doutorado Henri Gouraud, trabalhando com Dave Evans e Ivan Sutherland na Universidade de Utah, desenvolve uma técnica eficiente de melhoramento da percepção visual do sombreamento (shading) de superfícies suaves aproximadas por malhas poligonais (Gouraud 1971). Tal técnica, conhecida como Gouraud shading, consiste em interpolar linearmente os valores de intensidade de luz refletida dos vértices da malha poligonal. O resultado é a suavização da variação da reflexão de luz sem a necessidade de aumentar a resolução da malha geométrica (Figura 2.10).
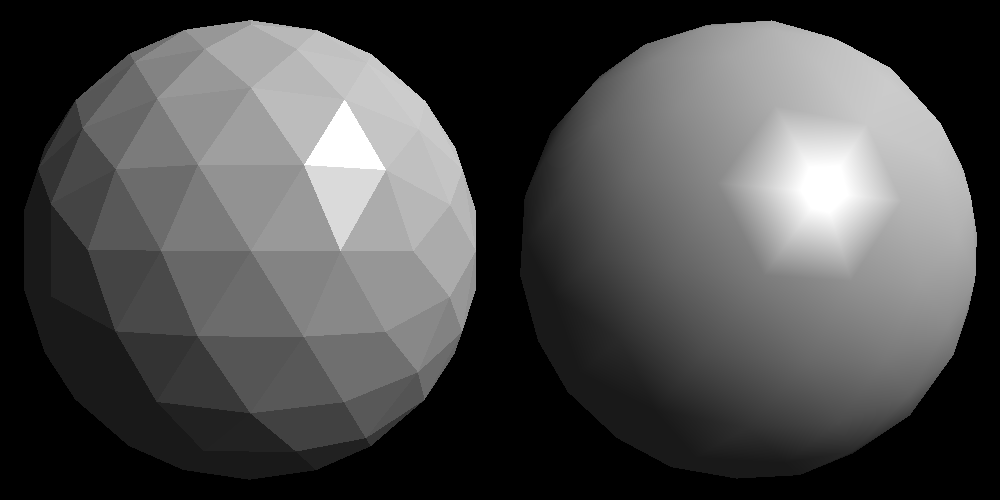
Figura 2.10: Visualização de uma esfera aproximada por triângulos, exibindo o aspecto facetado (esquerda) e suavizado com Gouraud shading (direita).
Em 1973, Bui Phong, também na Universidade de Utah, desenvolve o Phong shading como um melhoramento de Gouraud shading para reproduzir com mais fidelidade as reflexões especulares em aproximações de superfícies curvas (Phong 1973). Na figura 2.11 é possível comparar Gouraud shading e Phong shading lado a lado. Phong shading reproduz de forma mais acurada o brilho especular da esfera sem precisar usar uma malha poligonal mais refinada.
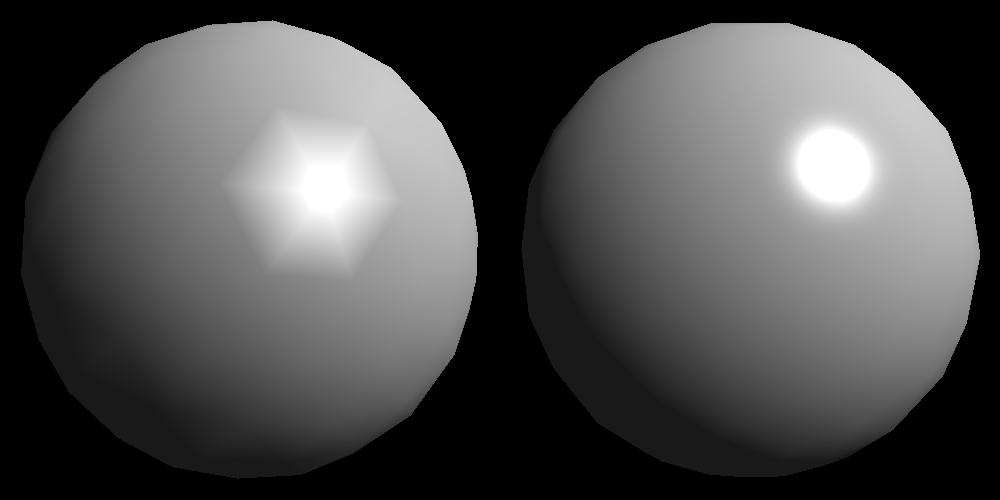
Figura 2.11: Visualização de uma esfera aproximada por triângulos, com Gouraud shading (esquerda) e Phong shading (direita).
Phong também propôs um modelo empírico de iluminação local de pontos sobre superfícies conhecido como modelo de reflexão de Phong. Em 1977, Jim Blinn, aluno da mesma universidade, propôs uma alteração do modelo de reflexão de Phong – o modelo de Blinn–Phong – mais acurado fisicamente e mais eficiente sob certas condições de visualização e iluminação (Blinn 1977). Nas décadas seguintes, o modelo de Blinn–Phong tornaria-se o padrão de indústria para síntese de imagens em tempo real, e ainda é muito utilizado atualmente.
Em 1974, Wolfgang Straßer, na Universidade Técnica de Berlim, e Ed Catmull, na Universidade de Utah, desenvolvem ao mesmo tempo, mas de forma independente, uma técnica que viria a ser conhecida como Z-buffering. Tal técnica permite identificar, de forma conceituamente simples e favorável à implementação em hardware, quais partes da geometria 3D estão visíveis de um determinado ponto de vista. Atualmente, essa técnica é largamente utilizada em síntese de imagens e é suportada em todo hardware gráfico.
Além de ter contribuído com a técnica de Z-buffering, Catmull também trouxe diversos avanços na área de modelagem geométrica, especialmente em subdivisão de superfícies e representação paramétrica de superfícies bicúbicas (Catmull 1974). Outra importante contribuição de Catmull foi o desenvolvimento da técnica de mapeamento de textura, ubíqua nas aplicações gráficas atuais e que permite aumentar a percepção de detalhes de superfícies sem aumentar a complexidade da geometria (figura 2.12).
).](https://upload.wikimedia.org/wikipedia/commons/f/f2/Texture_mapping_demonstration_animation.gif)
Figura 2.12: Animação do mapeamento de uma textura 2D sobre um modelo poligonal 3D (fonte).
Em 1975, o matemático Benoît Mandelbrot, na IBM, desenvolve o conceito de geometria de dimensão fracionária e cria o termo fractal (Albers and Alexanderson 2008). Desde então, fractais começam a ser explorados em síntese de imagens e modelagem geométrica para representar os mais diversos padrões e fenômenos naturais tais como contornos de mapas, relevo de terrenos, nuvens, texturas e plantas.
“Vol Libre”, de Loren Carpenter, foi o primeiro filme criado com fractais.
O vídeo, de apenas dois minutos, foi apresentado pela primeira vez na conferência SIGGRAPH ’80 após uma palestra técnica de Carpenter sobre a renderização de curvas e superfícies fractais:
De acordo com o livro “Droidmaker: George Lucas And the Digital Revolution” (Rubin 2005), ao final da exibição do vídeo, Ed Catmull e Alvy Smith, da Lucasfilm, abordaram Carpenter e ofereceram a ele um emprego na divisão de computação da empresa. Carpenter aceitou imediatamente.
Após a carreira na Lucasfilm, Carpenter ainda seria co-fundador da Pixar (junto com Catmull, Smith e outros) e cientista-chefe do estúdio de animação.
Em 1976, Steve Jobs, Steve Wozniak e Ronald Wayne fundam a Apple Computer (atualmente Apple Inc.). Em 1979, Steve Jobs entra em contato com as pesquisas de desenvolvimento de interface gráfica na Xerox PARC (atualmente PARC), divisão de pesquisa da Xerox em Palo Alto, Califórnia. Na PARC, Jobs conhece o Xerox Alto, o primeiro computador com uma interface gráfica baseada na metáfora do desktop e no uso do mouse (figura 2.13).
).](https://upload.wikimedia.org/wikipedia/commons/5/5e/Xerox_Alto_mit_Rechner.JPG)
Figura 2.13: Xerox Alto (fonte).
O Xerox Alto foi o resultado de desenvolvimentos iniciados por Douglas Engelbart e Dustin Lindberg no Stanford Research Institute, atual SRI International, por sua vez inspirados no SketchPad de Sutherland. Alguns anos depois, a Apple implementaria os conceitos do Xerox Alto nos computadores Apple Lisa e Macintosh, iniciando uma revolução no uso da interface gráfica nos computadores pessoais (PCs).
Em 1977, surge a primeira tentativa de padronização de especificação de comandos em sistemas gráficos: o Core Graphics System (ou simplesmente Core), proposto pelo Graphic Standards Planning Committee (GSPC) da ACM SIGGRAPH (Chappell and Bono 1978).
Em 1978, Jim Blinn desenvolve uma técnica de mapeamento de textura para simulação de vincos e rugosidades em superfícies: o bump mapping (Blinn 1978). Uma forma de bump mapping muito utilizada atualmente é o normal mapping. A técnica pode ser muito efetiva para manter a ilusão de uma superfície detalhada, mesmo quando a geometria utilizada é muito simples. A figura 2.14 mostra um exemplo dessa simplificação. Ao longo do quadrimestre implementaremos esta e outras técnicas de texturização.
).](https://upload.wikimedia.org/wikipedia/commons/9/98/Normal_map_example_updated.png)
Figura 2.14: Uso de normal mapping para simular a renderização de um modelo de quatro milhões de triângulos usando apenas dois triângulos (fonte).
No final da década, J. Turner Whitted desenvolve a técnica de traçado de raios (Whitted 1979). O traçado de raios consegue simular com mais precisão, e de forma conceitualmente simples, efeitos ópticos de reflexão, refração, espalhamento e dispersão da luz. Como resultado, consegue gerar imagens mais fotorrealistas, ainda que sob um custo computacional muito elevado quando comparado com a renderização baseada na rasterização, que consiste na varredura e preenchimento de primitivas geométricas projetadas.
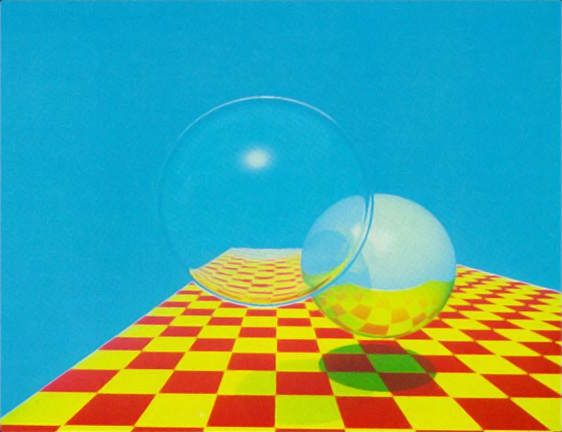
Figura 2.15: Esferas e tabuleiro de xadrez: uma das primeiras imagens geradas com traçado de raios, por Turner Whitted.
1980
Essa é a década em que a computação gráfica marca sua presença definitiva na indústria de cinema. O uso de cenas de computação gráfica é popularizado a partir de filmes como “Star Trek II: The Wrath of Khan” (1982), “Tron” (1982) e “Young Sherlock Holmes (1985), como resultado dos avanços das técnicas de síntese de imagem e modelagem geométrica da década anterior, combinado com o avanço da capacidade de processamento dos computadores. Durante essa década ocorrem também importantes avanços nas técnicas de síntese de imagens.
Em 1984, Robert Cook, Thomas Porter e Loren Carpenter desenvolvem o traçado de raios distribuído (distributed ray tracing), o qual permite reproduzir efeitos de sombras suaves, entre outros efeitos não contemplados pelo método original de Whitted (Cook, Porter, and Carpenter 1984). A figura 2.16 mostra um exemplo de renderização da cena de teste “Cornell box” usando essa técnica. A imagem tende a ser granulada como resultado da natureza estocástica do algoritmo.
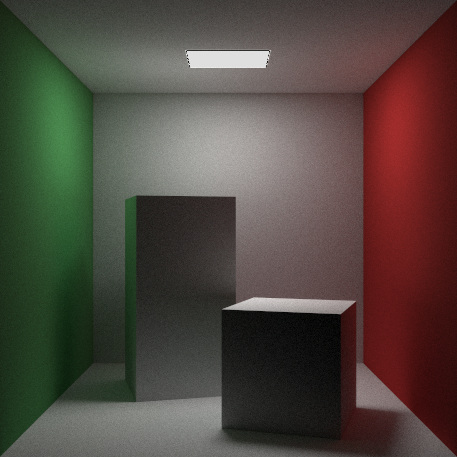
Figura 2.16: Imagem gerada com traçado de raios distribuído/estocástico.
Ainda em 1984, Donald Greenberg, Michael Cohen e Kenneth Torrance propõem a técnica de radiosidade (Greenberg, Cohen, and Torrance 1986) baseada no uso do método de elementos finitos para simular interreflexões de luz entre superfícies idealmente difusas. A solução da radiosidade de uma cena pode ser pré-processada e não depende da posição da câmera. Isso permite a visualização da cena em tempo real, desde que a posição dos objetos e fontes de luz mantenha-se estática. A figura 2.17 mostra um exemplo de cena renderizada com radiosidade usando o software RRV (Radiosity Renderer and Visualizer). O método de radiosidade pode ser combinado com traçado de raios para gerar imagens com melhor fidelidade de simulação de reflexão difusa e especular.
).](http://dudka.cz/rrv/files/screenshot/room4-step079-snapshot000.png?action=thumbnail640)
Figura 2.17: Imagem gerada com radiosidade (fonte).
Em 1985, o GKS (Graphical Kernel System), desenvolvido como um melhoramento da API Core, torna-se a API padrão ISO para gráficos independentes do dispositivo (ISO 1985). Através do GKS, o código de descrição de comandos para manipulação de gráficos 2D permite a portabilidade entre diferentes linguagens de programação, sistemas operacionais e hardware gráfico compatível. Entretanto, gráficos 3D ainda não são contemplados nesta API.
Em 1986, Steve Jobs adquire a divisão de computação gráfica da Lucasfilm e funda a Pixar junto com Ed Catmull, Alvy Smith e outros. Nessa época, Catmull, Loren Carpenter e Robert Cook desenvolvem o sistema de renderização RenderMan, muito utilizado na produção de efeitos visuais em filmes e animações. Após 14 anos, Catmull, Carpenter e Cook receberiam da Academia de Artes e Ciências Cinematográficas a estatueta do Oscar na categoria “Academy Scientific and Technical Awards” pelas contribuições à indústria do cinema representadas pelo desenvolvimento do RenderMan.
O sucesso do RenderMan deve-se em parte à sua elegante API – a RenderMan Interface (RISpec) – inspirada na linguagem PostScript. A API permite a descrição completa de cenas 3D com todos os componentes necessários à renderização. Isso garante resultados consistentes, independentes do software de modelagem utilizado.
O conceito de shaders, amplamente utilizado em hardware gráfico atual, surge do RenderMan shading language, desenvolvido na década de 1990 e incorporado no RISpec em 2005 como uma linguagem – dessa vez inspirada na linguagem C – de especificação de propriedades de superfícies, fontes de luz e efeitos atmosféricos de cena.
Em 1988 é organizado o 1º Simpósio Brasileiro de Computação Gráfica e Processamento de Imagens (SIBGRAPI), em Petrópolis, RJ. O evento, organizado anualmente pela CEGRAPI/SBC, internacionalizou-se e atualmente é chamado de Conference on Graphics, Patterns and Images.
1990
1990 é a década das APIs gráficas 3D e da popularização do hardware gráfico nos PCs. Empresas como a Sun Microsystems (adquirida pela Oracle em 2010), IBM, HP (Hewlett-Packard), e as agora extintas NeXT, SGI (Silicon Graphics, Inc.) e DEC, desenvolvem estações gráficas de alto desempenho equipadas com hardware capaz de acelerar operações de renderização baseadas em rasterização com suporte a Z-buffer, mapeamento de texturas, iluminação e sombreamento de superfícies (figura 2.18).
).](images/02_indigo.jpg)
Figura 2.18: Workstation SGI IRIS Indigo (fonte).
Neste período surgem as primeiras APIs para gráficos 3D como tentativa de padronizar a interface de programação entre as diferentes arquiteturas de hardware. Uma dessas APIs, desenvolvida ao longo da década de 1980 e que se estabelece como padrão da indústria na década de 1990, é o PHIGS (Programmer’s Hierarchical Interactive Graphics System) (Shuey 1987).
PHIGS utiliza o conceito de grafo de cena: uma estrutura de dados hierárquica que representa as relações entre os modelos geométricos e outras entidades de uma cena. A API trabalha com malhas poligonais e síntese de imagens baseada na rasterização (em oposição ao traçado de raios), prevê o suporte a Gouraud e Phong shading, mas não oferece suporte a mapeamento de texturas. Em oposição ao PHIGS, a SGI utiliza em suas estações gráficas IRIS a API proprietária IRIS GL (Integrated Raster Imaging System Graphics Library) com características semelhantes ao PHIGS, porém com suporte a mapeamento de texturas (McLendon 1992).
Diferentemente do PHIGS, o IRIS GL não adota o conceito de grafo de cena. As primitivas gráficas são enviadas imediatamente ao hardware gráfico em um pipeline de transformação geométrica e visualização. Esse modo de enviar os dados, conhecido como immediate mode, acaba por revelar-se mais apropriado para implemetação em hardware do que o retained mode do PHIGS com seu grafo de cena.
Em 1991, Mark Segal e Kurt Akeley, da SGI, iniciam o desenvolvimento de uma versão aberta do IRIS GL como tentativa de criar um novo padrão de indústria. Para isso, removem o código proprietário e modificam a API de modo a torná-la independente do sistema de janelas e de dispositivos de entrada. Deste desenvolvimento surge, em 1992, o OpenGL (Open Graphics Library) (Woo et al. 1999), que rapidamente ocupa o lugar do PHIGS como API padrão para gráficos 3D. Desde então, revisões periódicas do OpenGL são feitas de modo a suportar os aprimoramentos mais recentes do hardware gráfico.
O aspecto minimalista e de facilidade de uso do IRIS GL continuam presentes no OpenGL. Essas características fizeram – e ainda fazem – do OpenGL uma das APIs gráficas 3D mais populares em aplicações multiplataforma.
No início da década de 1990, as estações gráficas de alto desempenho suportavam apenas um número reduzido de características do OpenGL, sendo o restante simulado em software.
O sistema RealityEngine (Akeley 1993), lançado em 1992 pela SGI, foi o primeiro hardware gráfico capaz de oferecer suporte para todas as etapas de transformação e iluminação da versão 1.0 do OpenGL, incluindo o mapeamento de texturas 2D com mipmapping (uma técnica de pré-filtragem de texturas) e antialiasing (suavização de serrilhado). A arquitetura foi sucedida em 1996 pelo InfiniteReality (Montrym et al. 1997), desenvolvido especificamente para o OpenGL. Dependendo da configuração final, o custo de uma estação gráfica baseada no InfiniteReality poderia ser superior a 1 milhão de dólares.
Uma demonstração da SGI sobre as capacidades de renderização em tempo real do InfiniteReality em 1996 pode ser vista no vídeo de YouTube “Silicon Graphics - Onyx Infinite Reallity 50FPS”.
O sistema InfiniteReality evoluiu até o início da década de 2000. A figura 2.19 mostra um supercomputador equipado com o InfiniteReality 4.
).](https://64.media.tumblr.com/bc88f7a863f46a67ea7ddc1660655513/tumblr_ptggzdInko1xu0xuso1_1280.jpg)
Figura 2.19: SGI Onyx 300 com InfinityReality 4, de 2002 (fonte).
A partir de 1995, surgem nos PCs as primeiras placas de vídeo com aceleração de processamento gráfico 3D, também chamadas de aceleradoras gráficas 3D.
As primeiras aceleradoras gráficas eram capazes de realizar apenas a varredura de linhas não texturizadas e, em alguns casos, tinham desempenho similar ao código de máquina otimizado na CPU. Por outro lado, logo essas limitações foram vencidas e surgiram placas eficientes e com suporte a mapeamento de textura, impulsionadas pelo emergente mercado de jogos de computador.
Enquanto as primeiras estações gráficas da SGI implementavam um pipeline completo de transformação de vértices, ainda que sem suporte à texturização, as aceleradoras gráficas para PCs, produzidas por empresas como Diamond Multimedia, S3 Graphics (extinta em 2003), Trident Microsystems (extinta em 2012), Matrox Graphics e NVIDIA, ofereciam suporte ao mapeamento de texturas, porém sem transformação de geometria ou processamento de iluminação.
A 3Dfx Interactive (adquirida em 2000 pela NVIDIA), com a sua série de aceleradoras Voodoo Graphics lançadas a partir de 1996, ampliou enormemente o uso do hardware gráfico em jogos de computador. As placas Voodoo eram capazes de exibir triângulos texturizados com mipmapping e filtragem bilinear (figura 2.20). Entretanto, o hardware ainda dependia da CPU para preparar os triângulos para a rasterização. Os triângulos só poderiam ser processados pelo hardware gráfico se fossem previamente convertidos em trapézios degenerados, alinhados em coordenadas da tela.
) em uma placa gráfica 3Dfx Voodoo, de 1998 ([fonte](https://www.techspot.com/article/672-best-3dfx-glide-games/)).](https://static.techspot.com/articles-info/672/images/2016-12-15-image-4.jpg)
Figura 2.20: Jogo “Carmageddon II: Carpocalypse Now” (Stainless Games) em uma placa gráfica 3Dfx Voodoo, de 1998 (fonte).
Outra limitação das aceleradoras gráficas nesse período era a falta de suporte adequado a uma API padrão de indústria. A arquitetura de tais placas era incompatível com aquela especificada no OpenGL e fazia com que os desenvolvedores precisassem recorrer a APIs proprietárias, como a API Glide da 3Dfx (3Dfx 1997).
As placas da 3Dfx foram populares até o final da década quando então o OpenGL e a API Direct3D, da Microsoft, começaram a ser suportados de maneira eficiente pelas placas de concorrentes como a ATI Technologies (adquirida em 2006 pela AMD), Matrox e NVIDIA.
Na segunda metade da década, o desenvolvimento das placas gráficas para PCs acompanhou a evolução da API Direct3D. Em 1995, a Microsoft lança o Windows 95 Games SDK, um conjunto de APIs de baixo nível para o desenvolvimento de jogos e aplicações multimídia de alto desempenho no Windows. Em 1996, o Windows 95 Games SDK muda de nome para DirectX e sua segunda e terceira versões são disponibilizadas em junho e setembro desse mesmo ano. Entre as APIs contidas no DirectX, o Direct3D é concebido como uma API para hardware gráfico compatível com o pipeline de processamento do OpenGL.
Embora no início o Direct3D fosse criticado por sua arquitetura demasiadamente confusa e mal documentada em comparação com o OpenGL (como relatado por John Carmack, da id Software, em sua carta sobre o OpenGL), eventualmente torna-se a API mais utilizada em jogos uma vez que novas versões começam a ser distribuídas em intervalos menores que aqueles do OpenGL. A revisão do OpenGL dependia do ARB (Architecture Review Board): um consórcio independente formado por representantes de diversas empresas de hardware e software que se reuniam periodicamente para propor e aprovar mudanças na API. O Direct3D, por ser proprietário, respondia melhor ao rápido desenvolvimento das placas gráficas naquele momento e passou a ditar a especificação das futuras aceleradoras gráficas voltadas ao mercado de jogos.
Em 1997 é anunciado o DirectX 5 (o DirectX 4 nunca chegou a ser lançado), acompanhando as primeiras placas capazes de renderizar triângulos, tais como a ATI Rage Pro e NVIDIA Riva 128 (figura 2.21). A Riva 128 não alcançava a mesma qualidade de imagem produzida pelas placas da 3Dfx, mas ultrapassava as placas Voodoo em várias medições de desempenho. Ainda assim, a aceleração de processamento de geometria era inexistente e a CPU era responsável por calcular as transformações geométricas e interpolações de atributos de vértices ao longo das arestas para cada triângulo transformado.
).](https://upload.wikimedia.org/wikipedia/commons/thumb/f/f8/NVidia_Riva_128.jpg/640px-NVidia_Riva_128.jpg)
Figura 2.21: Placa gráfica Diamond com o chip NVIDIA Riva 128, de 1997 (fonte).
Em 1998 é lançado o DirectX 6 e surgem as primeiras aceleradoras gráficas capazes de interpolar atributos ao longo de arestas. Nessa geração de hardware gráfico, a CPU ainda era responsável pela transformação e iluminação de cada vértice, mas agora bastava enviar à placa gráfica os atributos de cada vértice em vez de atributos interpolados para cada aresta de cada triângulo. Um ano depois, o DirectX 7 é lançado com suporte para aceleração em hardware de transformação e iluminação (figura 2.22). As primeiras placas compatíveis com DirectX 7 surgiriam no ano seguinte.
 ([UL](https://www.ul.com/)) usando DirectX 7 com transformação de geometria e cálculo de iluminação em hardware.](images/02_3dmark2000.jpg)
Figura 2.22: Demonstração do benchmark 3DMark2000 (UL) usando DirectX 7 com transformação de geometria e cálculo de iluminação em hardware.
2000
A década de 2000 presencia o que pode ser considerado uma revolução no uso do hardware gráfico: surgem os primeiros processadores gráficos programáveis (programmable GPUs) capazes de alterar o comportamento do pipeline de renderização sem depender da CPU. Isso torna possível a implementação de diversos novos modelos de reflexão para além do tradicional modelo de Blinn–Phong disponível no pipeline de função fixa (pipeline não programável). Além disso, a capacidade de programar processadores gráficos possibilita a implementação de um incontável número de novos efeitos visuais. As GPUs programáveis tornam-se muito populares em PCs, impulsionadas pelas exigentes demandas do mercado de jogos. Ao mesmo tempo, tornam-se muito flexíveis e poderosas não só para jogos, mas também para processamento de propósito geral.
O hardware gráfico programável surge no início de 2001 com o lançamento da GPU NVIDIA GeForce 3 (figura 2.23), inicialmente para o computador Apple Macintosh (Lindholm, Kilgard, and Moreton 2001).
).](https://upload.wikimedia.org/wikipedia/commons/5/5b/Geforce3gpu.jpg)
Figura 2.23: GPU NVIDIA GeForce (fonte).
No início de 2001, durante o evento MacWorld Expo Tokyo, é exibido o curta metragem “Luxo Jr.”, produzido pela Pixar em 1986. Entretanto, desta vez o filme é renderizado em tempo real em um computador equipado com uma GeForce 3. Steve Jobs, então CEO da Apple, observou:
“Há 15 anos, o que levava 75 horas para produzir cada segundo de vídeo, está agora sendo renderizado em tempo real na GeForce 3.”
— Steve Jobs (Morris 2001)
Mais tarde, as potencialidades de uma GPU similar seriam exibidas durante uma demonstração de tecnologia na conferência SIGGRAPH 2001: uma versão interativa do filme “Final Fantasy: The Spirits Within”, de Hironobu Sakaguchi, renderizada em tempo real em uma GPU NVIDIA Quadro DCC (Sakaguchi and Aida 2001). Neste evento, a NVIDIA destacou que o desempenho em operações em ponto flutuante utilizadas para desenhar apenas um quadro do filme era superior ao poder computacional total de um supercomputador Cray (tradicional fabricante de supercomputadores, adquirida em 2019 pela Hewlett Packard Enterprise) naquele momento.
Ao longo da década, as GPUs de baixo custo (na faixa de 100 a 250 dólares), produzidas por empresas como NVIDIA e ATI, desbancam as estações gráficas de alto desempenho ainda baseadas em tecnologias da década anterior. As placas gráficas para computadores pessoais ultrapassam rapidamente as capacidades computacionais de sistemas como o RealityEngine da SGI, mas ao mesmo tempo com uma redução de custo superior a 90% em comparação com esses sistemas. De acordo com a Lei de Moore, e observando a diminuição do custo das CPUs nesse período, tais placas deveriam custar muito mais, em torno de 15 mil dólares. Esse avanço expressivo das GPUs é implacável com as fabricantes de estações gráficas. Em 2009, a SGI decreta falência.
As APIs Direct3D (em 2006) e OpenGL (em 2009) anunciam a descontinuidade do suporte ao pipeline de função fixa. Com isso, as aplicações migram definitivamente ao uso dos shaders: programas que modificam o comportamento das etapas programáveis do pipeline, como o processamento de geometria e fragmentos (amostras de primitivas rasterizadas).
Com o aumento do conjunto de instruções suportadas nas GPUs, percebe-se que é possível usar o hardware gráfico para processamento de propósito geral em tarefas como simulação de dinâmica de fluidos, operações em bancos de dados, modelagem de dinâmica molecular, criptoanálise, entre muitas outras tarefas capazes de se beneficiar de processamento paralelo. O termo GPGPU (General-Purpose Computation on GPUs) é utilizado para se referir a esse uso. Uma das tecnologias pioneiras de GPGPU foi o BrookGPU, desenvolvido na Universidade Stanford em 2004, composta de um compilador e um módulo de tempo de execução compatível com Direct3D e OpenGL (Buck et al. 2004). Até então, o processamento de propósito geral usando GPUs exigia do desenvolvedor conhecimento de APIs gráficas como Direct3D ou OpenGL para a criação de shaders customizados de vértices e pixels em linguagens como HLSL (da Microsoft), Cg (da NVIDIA), ou até mesmo em shader assembly. BrookGPU possibilitou simplificar esse fluxo de trabalho ao oferecer uma extensão de ANSI C – a linguagem Brook – voltada especificamente ao processamento paralelo de fluxos de dados.
Em 2007, a NVIDIA lança a plataforma CUDA (Compute Unified Device Architecture), composta por um conjunto de ferramentas/bibliotecas e API de GPGPU para GPUs da NVIDIA. A plataforma é muito popular atualmente, impulsionada pelo crescimento das aplicações em ciência de dados e aprendizado de máquina. Influenciada pelo CUDA, surgem em 2009 outras plataformas como o DirectCompute, da Microsoft (como parte do Direct3D 11), e a especificação aberta OpenCL do Khronos Group, mesmo consórcio de indústrias que mantém o OpenGL.
As primeiras oficinas e conferências sobre GPGPU, como a ACM GPGPU e a GPU Technology Conference (GTC), da NVIDIA, surgem neste período.
A figura 2.24 mostra um exemplo atual de aplicação de GPGPU para a modelagem de DNA.
. ([fonte](https://en.wikipedia.org/wiki/Abalone_(molecular_mechanics)#/media/File:DNA-ligand-by-Abalone.png)).](https://upload.wikimedia.org/wikipedia/commons/8/8b/DNA-ligand-by-Abalone.png)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
#/media/File:DNA-ligand-by-Abalone.png){kind=link}
2010
A partir da década de 2010, a aceleração de gráficos 3D se expande e se populariza nos dispositivos móveis. O uso de multitexturização (uso de vários estágios de texturização) e de técnicas como normal mapping, cube mapping (para simulação de superfícies reflexivas) e shadow mapping (para simulação de sombras) torna-se comum em aplicações gráficas interativas.
Em 2011, o Khronos Group anuncia o padrão WebGL, ampliando a possibilidade de uso de aceleração de gráficos 3D nos navegadores.
Na segunda metade da década, a renderização baseada em física, do inglês Physically Based Rendering (PBR), começa a ser empregada em jogos de computador e em consoles. O jogo Alien: Isolation (Creative Assembly), de 2014, é um dos primeiros a explorar essa tecnologia (figura 2.25).
) ([fonte](https://www.mobygames.com/game/playstation-4/alien-isolation/screenshots/gameShotId,741242/)).](https://www.mobygames.com/images/shots/l/741242-alien-isolation-playstation-4-screenshot-exploring-the-torrens.jpg)
Figura 2.25: Uso de renderização baseada em física no jogo “Alien: Isolation” (Creative Assembly) (fonte).
A renderização baseada em física procura simular de forma fisicamente correta a interação da luz com os diferentes materiais de uma cena (Pharr, Jakob, and Humphreys 2016). Até então os algoritmos de iluminação e sombreamento em tempo real eram baseados em modelos empíricos, simplificados e pouco realistas, desenvolvidos para o hardware mais limitado da década anterior. Na renderização baseada em física, os materiais são descritos por informações de detalhes de microsuperfície obtidos por fotogrametria. A figura 2.26 mostra o modelo de uma arma renderizada com PBR e o conjunto de texturas utilizado.
, e conjunto de texturas utilizadas ([fonte](https://cghero.com/glossary/pbr-texturing)).](images/02_pbr.jpg)
Figura 2.26: Arma renderizada com PBR usando o toolkit de renderização Marmoset, e conjunto de texturas utilizadas (fonte).
Em 2014, Ian Goodfellow e seus colegas da Universidade de Montreal anunciam as Redes Adversárias Generativas (GANs) (Goodfellow et al. 2014). GANs são arquiteturas de redes neurais que permitem a geração de dados originais a partir do treinamento simultâneo de duas redes que competem entre si: uma rede geradora (por exemplo, treinada para gerar imagens de rostos de pessoas) e uma rede discriminadora (por exemplo, treinada para diferenciar rostos reais de rostos falsos). A rede geradora é otimizada a partir da discriminadora, como em um jogo minimax em que o discriminador tenta maximizar a chance de diferenciar corretamente os dados gerados dos dados reais de treinamento, e o gerador tenta minimizar a chance do discriminador classificar que os dados gerados são falsos. Em 2019, a NVIDIA Research desenvolve o StyleGAN (Karras, Laine, and Aila 2019), uma arquitetura de GAN que combina técnicas de aprendizado profundo e transferência de estilo neural (Gatys, Ecker, and Bethge 2016) para gerar rostos indistinguíveis de imagens reais. A técnica é popularizada com o site This Person Does Not Exist (Essa Pessoa Não Existe) que usa o modelo StyleGan2 para gerar um novo rosto a cada vez que a página é atualizada (figura 2.27).
 usando o modelo StyleGAN2 da NVIDIA.](images/02_thispersondoesnotexist.jpg)
Figura 2.27: Rosto gerado pelo site https://thispersondoesnotexist.com/ usando o modelo StyleGAN2 da NVIDIA.
Em 2016 são lançadas novas gerações de headsets de realidade virtual como o Oculus Rift e HTC Vive, que elevam as exigências de hardware gráfico para jogos que utilizam essa tecnologia. Também em 2016, o Khronos Group lança a API Vulkan como uma API de baixo nível ideal para explorar os recursos gráficos e de computação das novas gerações de GPUs. Vulkan dá ao desenvolvedor maior controle para gerenciar tarefas que anteriormente eram feitas exclusivamente pelo driver de vídeo, como a alocação, sincronização e transferência de recursos para a GPU. Vulkan também permite um melhor aproveitamento do processamento concorrente entre a CPU e a GPU.
Em 2018 é incorporado ao Direct3D 12 o DirectX Raytracing (DXR), que introduz um novo pipeline gráfico destinado ao traçado de raios em tempo real. Ainda em 2018, as GPUs NVIDIA RTX série 20 são as primeiras a suportar essa tecnologia.
Em 2019 a NVIDIA anuncia o Deep Learning Super Sampling (DLSS): um conjunto de tecnologias baseadas em redes neurais de aprendizagem profunda capazes de aumentar em tempo real a resolução dos quadros de exibição de jogos em computadores com GPUs RTX. A partir de uma imagem de baixa resolução, o modelo treinado consegue inferir uma imagem de alta resolução de forma mais eficiente e com mesmo nível de detalhes do que o jogo conseguiria obter caso renderizasse diretamente a imagem em alta resolução. O vídeo de divulgação a a seguir mostra o ganho de desempenho obtido com o uso de DLSS em diversos jogos:
2020
Em 2020, as GPUs NVIDIA RTX série 20 são sucedidas pela série 30, ampliando ainda mais a possibilidade de uso de traçado de raios em tempo real. A AMD lança as GPUs da série Radeon RX 6000, também com suporte a traçado de raios. Além disso, uma API de traçado de raios é incorporada ao Vulkan como o conjunto de extensões Vulkan Ray Tracing.
O vídeo a seguir mostra exemplos de renderização com traçado de raios nas GPUs RTX:
Ainda estamos no início da década, mas o aumento da capacidade de processamento e largura de banda de memória do hardware gráfico deve continuar a empurrar os limites do que é possível renderizar em tempo real. Efeitos atmosféricos, texturas de altíssima resolução e iluminação global6 em tempo real devem se popularizar nos próximos anos.
Um exemplo do estado-da-arte em técnicas de renderização em tempo real usando iluminação global pode ser visto neste vídeo de apresentação do motor de jogo Unreal Engine 5:
As tecnologias baseadas em aprendizagem profunda também devem continuar trazendos aprimoramentos na qualidade e eficiência em síntese de imagens em tempo real. A NVIDIA tem expandido tecnologias como o NVIDIA Real-Time Denoiser (NRD) para remover o ruído de imagens renderizadas com traçado de raios, o Deep Learning Anti-Aliasing (DLAA) para suavização de serrilhados (anti-aliasing) em resolução nativa, e a tecnologia Deep Learning Dynamic Super Resolution (DLDSR), que renderiza imagens de alta resolução e então reduz para a resolução da tela, obtendo com isso uma imagem de qualidade superior com mesma eficiência da renderização na resolução nativa.
Esta também deve ser a década da criação de conteúdo através de modelos generativos. Em 2021, a OpenAI anunciou o DALL-E: um conjunto de modelos neurais baseados em métodos de difusão capazes de gerar imagens a partir de textos descritivos em linguagem natural. A tecnologia vem se desenvolvendo rapidamente. O DALL-E 2, anunciado em abril de 2022, permite criar imagens originais de alta qualidade, variações de imagens existentes em diferentes estilos, além de permitir a extensão de imagens para além de suas bordas originais (outpainting). Também em 2022, o Google Brain anunciou tecnologias semelhantes como o Imagen (Saharia et al. 2022) e o Parti (Yu et al. 2022). Além desses, o laboratório de pesquisa independente Midjourney anunciou uma ferramenta similar com versão beta disponível ao público através de um bot no Discord. Recentemente, uma imagem produzida no Midjourney (figura 2.28) ganhou a competição de arte digital na 2022 Colorado State Fair, gerando controvérsia entre os artistas.
).](https://video-images.vice.com/articles/630f7247f223f2009b433bb8/lede/1661956681982-screen-shot-2022-08-30-at-102800-pm.png)
Figura 2.28: “Théâtre d’Opéra Spatial”, assinada por “Jason T. Allen via Midjourney”, vencedora da competição de arte digital da 2002 Colorado State Fair (fonte).
O vídeo a seguir destaca os principais recursos do DALL-E 2:
DALL-E, Imagen, Parti e Midjourney são tecnologias proprietárias que não disponibilizam o código fonte ou os pesos dos modelos. Entretanto, recentemente começaram a surgir modelos abertos, entre eles o Crayon, também conhecido como Dall-E Mini da Crayon LLC, o Latent Diffusion da Universidade de Heidelberg (Rombach et al. 2022), e o Stable Diffusion da StabilityAI. Demonstrações estão disponíveis online em https://www.craiyon.com/ e na plataforma Hugging Face (Latent Diffusion e Stable Diffusion).
O vídeo a seguir, do canal de YouTube Two Minute Papers, apresenta os recursos do Stable Diffusion:
Por fim, a década de 2020 tem presenciado avanços significativos na área de renderização neural. Renderização neural consiste no uso de tecnologias baseadas em redes neurais para reconstruir modelos 3D a partir de uma coleção de imagens 2D. Uma dessas tecnologias é o Neural Radiance Field, ou NeRF (Mildenhall et al. 2020). NeRFs são modelos de redes neurais completamente conectadas que representam a forma como a luz se propaga dentro de uma cena a partir de uma posição e orientação de visão. NeRFs podem ser usadas para gerar representações implícitas das superfícies da cena, mas também para renderizar imagens a partir de qualquer ponto de vista, com sombreamento e iluminação.
Uma técnica estado-da-arte de renderização neural é o Instant NeRF, da NVIDIA Research. Um vídeo de demonstração é exibido a seguir:
Referências
O Spacewar! original rodando em um emulador de PDP-1 de JavaScript está disponível em https://spacewar.oversigma.com/.↩︎
Métodos de iluminação global são aqueles capazes de simular as interreflexões de luz de um ambiente para a composição da cor final de cada pixel, como o método de traçado de raios e radiosidade.↩︎